奥村組と西松建設が「わんワン測量™」を共同開発、シールドトンネル測量を4足歩行ロボットで自動化
シールドトンネル測量がロボットで自動化へ
株式会社奥村組と西松建設株式会社は、シールド工事のトンネル内で測量を行う新しいシステム「わんワン測量™」を共同で開発しました。このシステムは、4足歩行ロボットを使って、これまで人が手作業で行っていた測量の準備作業を自動化するものです。

建設現場の課題と「わんワン測量™」
建設業界では、働く人の数が減っているため、IT技術などを活用して仕事を効率良く進めることが求められています。シールド工事のトンネル測量もその一つです。
これまでのトンネル測量は、掘る作業が終わった後、作業員が長いトンネルの中を移動して手作業でプリズム(測量に使う反射鏡)を設置していました。この作業は時間がかかり、特に狭いトンネルでは作業員にとって大きな負担でした。自動で測量する機械を使っても、プリズムを別の場所に動かすときは人の手が必要でした。「わんワン測量™」は、このような課題を解決するために開発されました。
「わんワン測量™」の仕組み
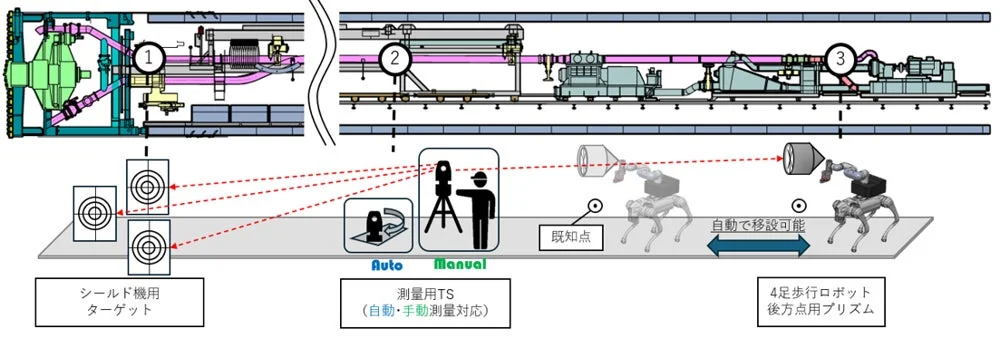
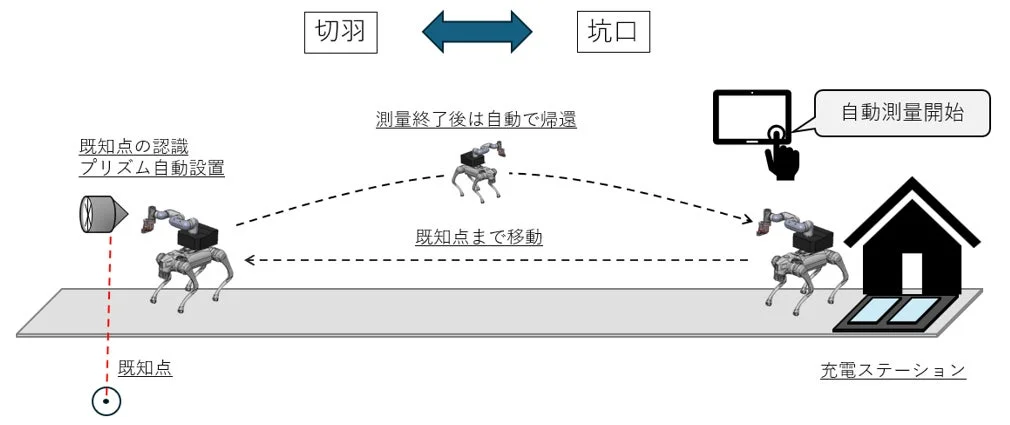
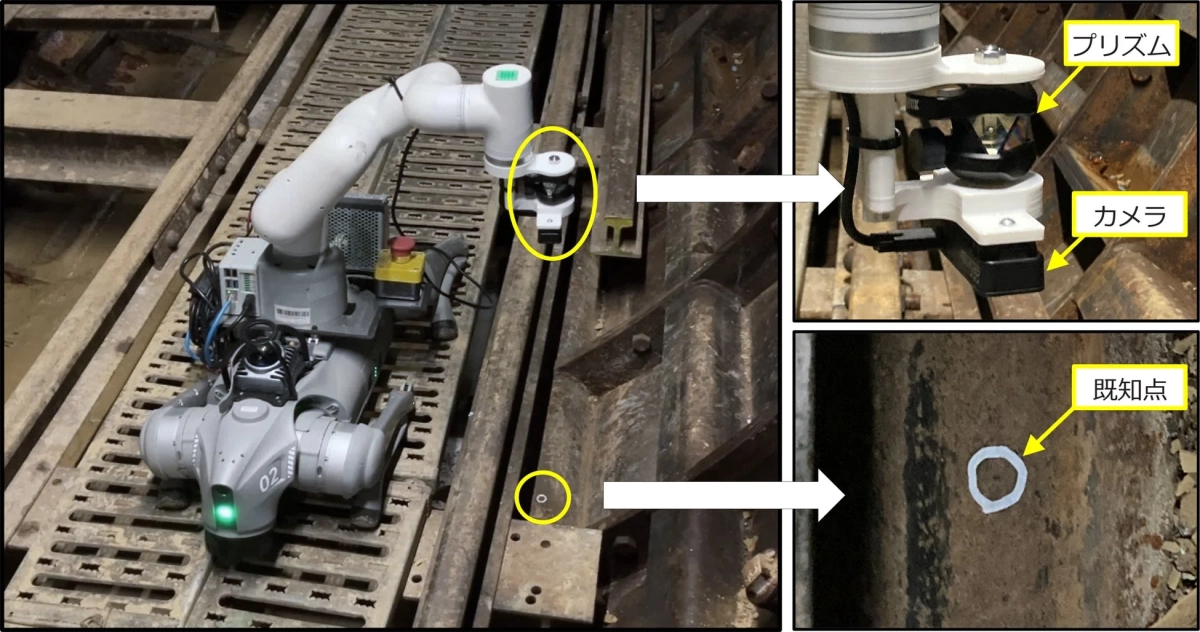
このシステムは、4足歩行ロボットとロボットアームを使って、トンネル内の基準点(既知点)にプリズムを自動で設置します。これにより、トンネル内の移動やプリズム設置の作業を人が行わずに済むようになります。
1. 4足歩行ロボット
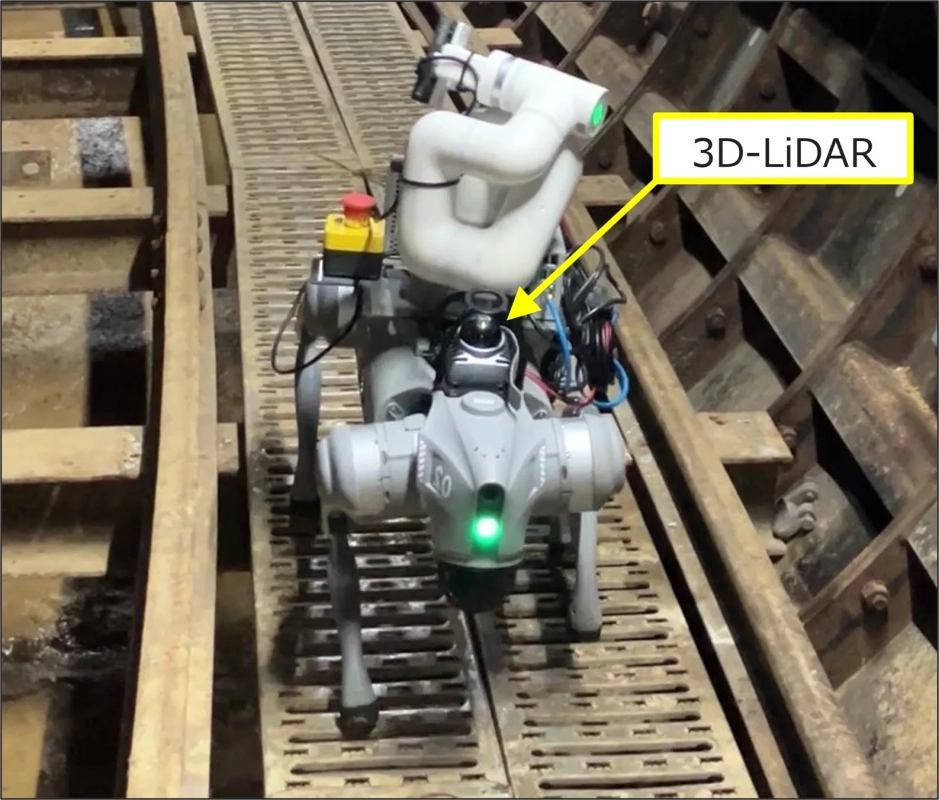
「わんワン測量™」に採用された4足歩行ロボットは、トンネルの形や線路のような設備に左右されず、足場の上を自由に動くことができます。遠くから操作して、自動で出発したり、測量後に元の場所に戻ったりする機能も備わっています。ロボットの上には「3D-LiDARセンサー」という、周りの様子を立体的にとらえるセンサーが搭載されており、これを使って決められた場所まで自動で移動します。
2. ロボットアーム
ロボットは既知点に着くと、倒れないように重心を低くして安定した姿勢をとります。その後、ロボットアームを伸ばし、先端のカメラで撮影した画像をもとにAI(人工知能)がアームを調整し、プリズムを正確に設置します。

3. 自動充電ステーション(犬小屋)
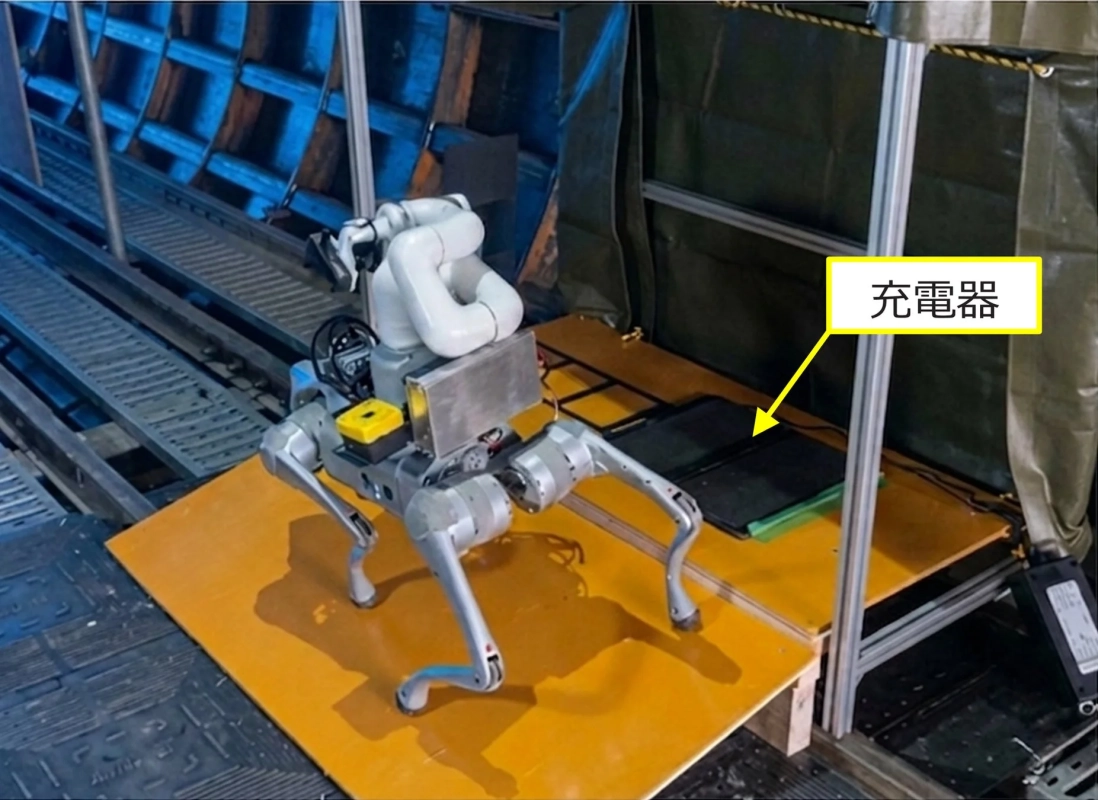
4足歩行ロボットは、作業を始める時に後ろの台車に置かれた自動充電ステーション(「犬小屋」と名付けられています)から自動で出発し、作業が終わると自動で戻って充電します。もし充電ステーションの近くにロボットが乗り越えにくい段差がある場合は、スロープが必要になります。
実証試験でその実力を確認
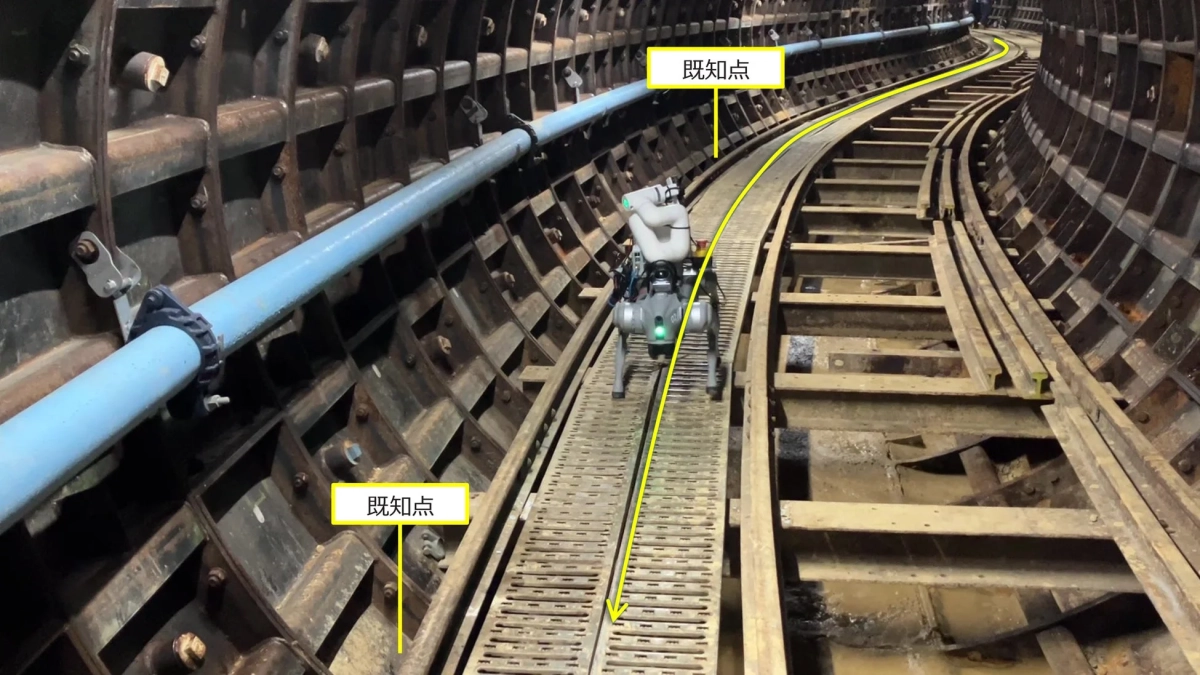
奥村組は、実際のトンネルと同じ環境を作った施設や、実際に工事中のシールドトンネル現場で「わんワン測量™」の試験を行いました。
その結果、ロボットが幅約480mmの足場の上を自律的に移動できることや、カーブのきつい場所でも安定して歩けることを確認しました。また、プリズムを設置する精度についても、2点間の距離を測ったときの誤差が2mm程度に収まることを確認しています。
今後の展望
今後、奥村組と西松建設は、さらに測量の精度を高め、現場での試験を重ねて、このシステムを実用化していく予定です。また、西松建設が開発した「遠隔測量システム」と組み合わせることで、プリズムの設置から測量、自動での目標確認までの一連の作業を完全に自動化し、測量作業の省人化と効率化を進めていくとしています。
この技術は、2026年6月17日(水)から20日(土)に幕張メッセで開催される「第8回 国際 建設・測量展(CSPI-EXPO 2026)」の西松建設ブースで共同展示される予定です。