フィジカルAIと次世代通信でコンビナート設備点検を高度化、国内初の実証に成功
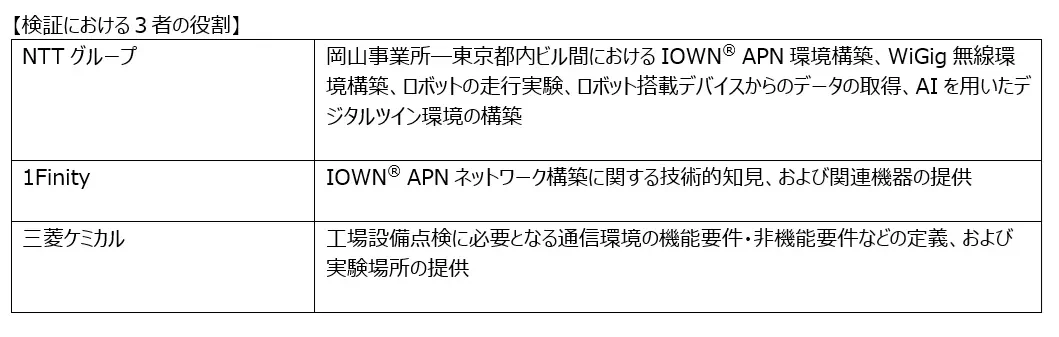
NTTグループの4社(NTT東日本株式会社、NTTドコモビジネス株式会社、NTTドコモソリューションズ株式会社、株式会社NTTデータグループ)、富士通グループの1Finity株式会社、そして三菱ケミカルグループの三菱ケミカル株式会社が協力し、日本のコンビナート設備点検をより高度にするための実証実験を国内で初めて行いました。
この取り組みは、IOWN(R) APNという次世代の通信技術と、AIを活用した「フィジカルAI」という技術、さらに60GHz帯無線LANを組み合わせることで、工場設備の点検作業を効率化し、現場で働く人たちの負担を減らすことを目指しています。
実証の背景
大規模な工場設備が集まるコンビナートでは、安全に施設を動かし続けるために、定期的な屋外点検が欠かせません。しかし、施設の規模が大きいと点検に多くの時間と人手が必要となり、作業員の負担をどう減らすかが長年の課題でした。
このような課題を解決するため、NTTグループ、1Finity、三菱ケミカルの3者は、国際的な団体であるIOWN Global Forum™の活動に参加し、IOWN構想の実現に向けて取り組んできました。過去には、IOWN(R) APNを使った遠隔操作ロボットによる工場点検の実験や、IOWN(R) APNと60GHz帯無線LANを組み合わせた大容量で遅延の少ない通信環境の検証も行われています。
-
IOWN Global Forum™について: https://iowngf.org/
-
2024年の工場設備点検検証について: https://www.nttdata.com/global/ja/news/release/2024/122000/
-
2026年2月の通信環境検証について: https://www.nttcom.co.jp/news/pr26040601.html
検証の具体的な内容
今回の実証実験は、2026年2月に岡山県の水島臨海工業地帯にある三菱ケミカル岡山事業所で行われました。IOWN(R) APNと60GHz帯無線LANを使って、ロボットによる屋外設備点検の高度化を試みました。

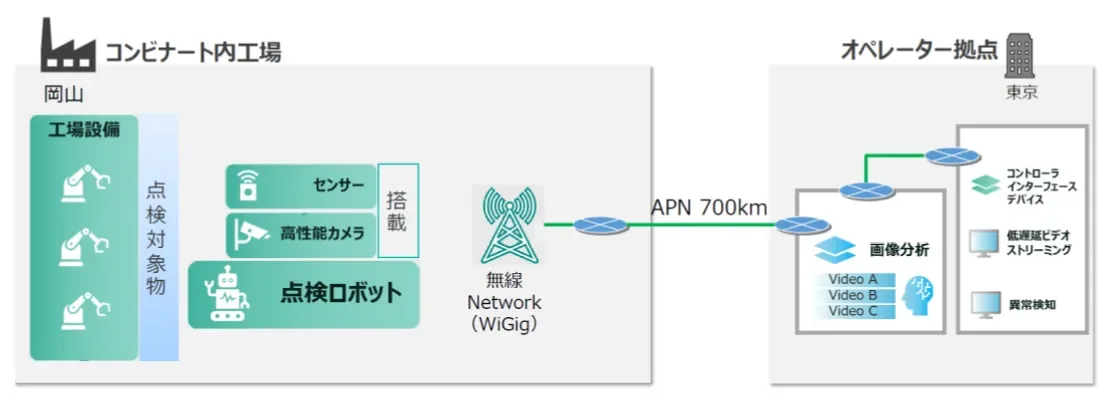
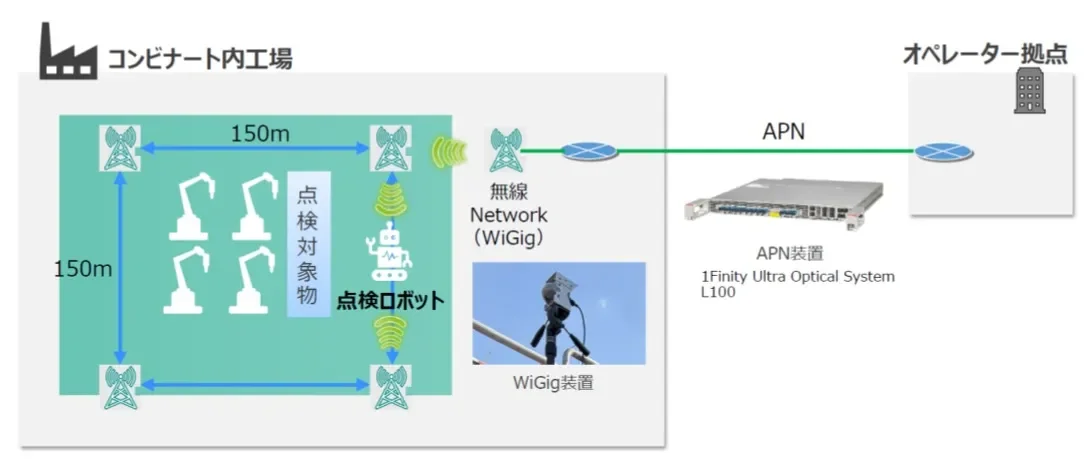
1. 大容量・低遅延通信環境の構築
三菱ケミカル岡山事業所から、約700km離れた東京都内にあるNTTグループのビルまで、IOWN(R) APNの通信環境が作られました。また、岡山事業所の敷地内には、60GHz帯無線LAN(WiGig)のアクセスポイントが複数置かれ、約150m×150mの広い範囲で無線通信ができるようになりました。
ロボットが移動しても通信が途切れないように、端末が自動で最適なアクセスポイントに切り替わる「端末主導動的サイトダイバーシティ制御技術」も使われています。
- 端末主導動的サイトダイバーシティ制御技術について: https://group.ntt/jp/newsrelease/2022/02/25/220225a.html
2. ロボットの遠隔操作と自律走行
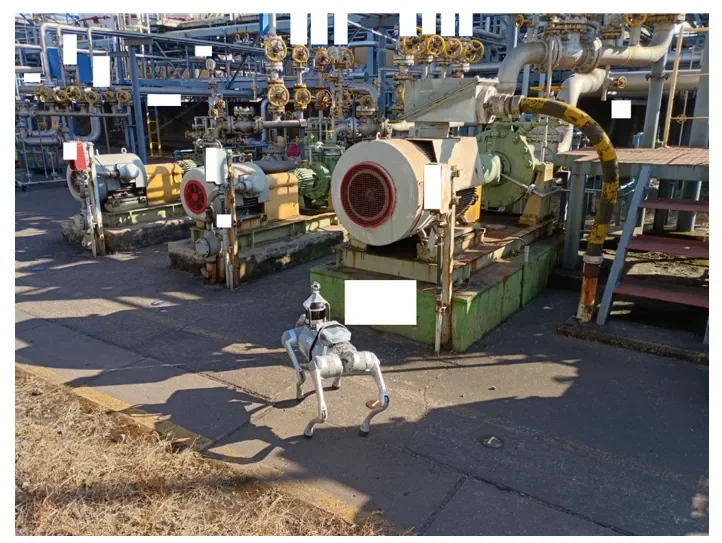
この通信環境を使って、東京都内のオペレーターが岡山事業所の四足歩行ロボットを遠隔で操作しました。ロボットは人の助けなしに150m×150mの範囲を一周できました。また、通信が途切れた際には、ロボットが安全に停止することも確認されました。
さらに、四足歩行ロボットは、センサーを使って自分で地図を作りながら、自分の位置を見失うことなく自律的に走行できました。障害物(人や物)を認識して避けることも可能です。四輪駆動ロボットも同様に自律走行ができることが確認されました。

3. データの低遅延送信
ロボットがカメラやマイクで集めた映像や音のデータは、岡山事業所から東京都内まで約700km離れたIOWN(R) APNを通じて送られました。ロボットが動いている最中でも、映像の遅延時間は目標の500ミリ秒以内を達成しました。これにより、映像がスムーズに流れ続ける中でロボットが安定して動き、遠隔での監視や操作が十分にできることが実証されました。
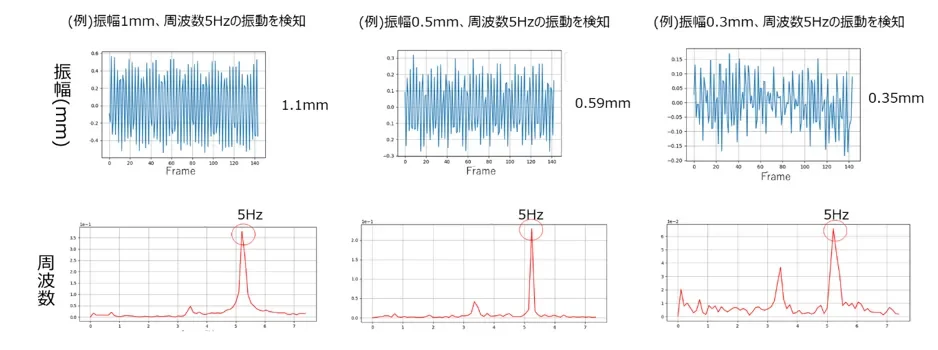
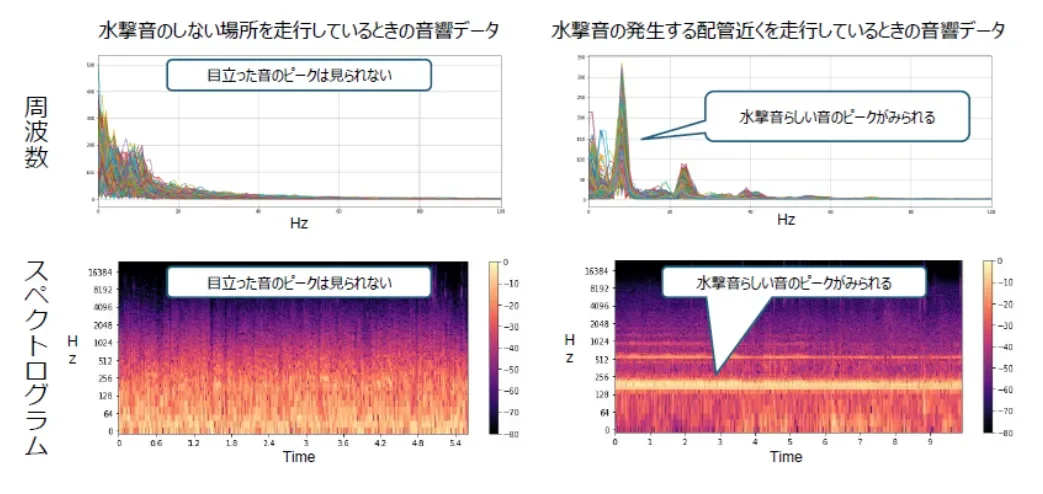
4. 振動と音の異常検知
四足歩行ロボットに搭載されたカメラとマイクで、映像データと音響データを同時に取得し、AIで解析することで、設備に異常がないかを調べました。今回は、異音(水撃音)が発生するポンプ機と配管が対象です。
ロボットがポンプ機と配管の近くで撮影・集音したデータをAIで解析した結果、普段とは異なる異常が発生していることを検知しました。この結果は、配管に直接取り付けられたセンサーの数値とほぼ同じでした。このことから、ロボットを使っても、ポンプ機などの異常を高い精度で判断できることが示されました。
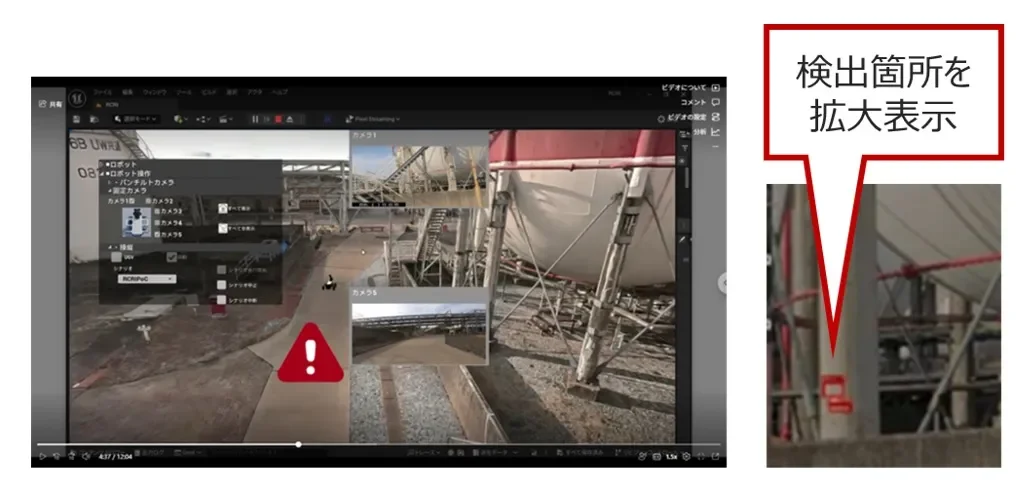
5. デジタルツインを用いたひび割れ点検
自律型の四輪駆動ロボットが150m×150mの範囲を一周することで、3Dの空間マップが作られ、デジタルツイン環境の基礎が築かれました。その後、ロボットが取得した高精細な映像データは、IOWN(R) APNを通じて岡山事業所から東京都内ビルへ送られ、AIによる画像認識で解析された後、デジタルツイン環境に反映されました。
この検証では、コンクリートのひび割れ情報がデジタルツイン環境にすぐに表示され、その画像をクリックするとひび割れの詳細を確認できました。映像データの取得からAI解析、デジタルツインへの反映までの一連の作業は500ミリ秒以下で完了し、映像伝送の安定性も非常に高く、パケット損失は0.1%以下でした。さらに、将来的にひび割れに発展する可能性のある微細なひび割れも検出できることが確認されました。
これらの結果から、自律型ロボットやデジタルツインといったフィジカルAI技術を活用することで、遠く離れた場所からでもリアルタイムで設備点検を行い、異常の兆候を事前に察知できる可能性が示されました。
検証結果と今後の展望
今回の実証実験では、大容量で遅延の少ない通信環境を構築し、以下の2つの重要な点が実証されました。
- データを取得しながら、ロボットが安定して自律走行できること。
- 自律型ロボットやデジタルツインなどのフィジカルAI技術を使うことで、遠隔地からリアルタイムで設備点検や異常の兆候監視ができる可能性。
これらの技術は、点検に必要な人員を一つの拠点に集めたり、複数の場所での点検を同時に行ったりすることを可能にし、コンビナートなどの工場設備を点検する作業員の負担を減らすことに貢献すると考えられます。
今後は、映像、音響、臭い、温度など、さまざまな種類のデータを統合し、「人に代わる認知機能」をさらに高めていく必要があります。そのため、マルチモーダルAIという、複数の種類のデータをまとめて判断できるAIに対応したコンピューティング基盤をより高度にするための実証が続けられる予定です。
各社のコメント
NTTドコモソリューションズ株式会社 執行役員 ネットワーククラウド事業本部 IOWN推進部長 北田 祥規氏は、「今回の実証は、IOWN構想が目指す次世代通信基盤とロボット・AI・デジタルツインが融合することで、産業インフラのあり方を変える可能性を示しています。リアルタイムでのデータ収集、解析、可視化を一体で実現することで、遠隔からの高度な設備点検や異常の兆候監視による『現場の安全性向上および作業負担の軽減』に向けた大きな一歩となりました。今後、この技術が様々な産業分野に広がり、持続可能な社会の実現に貢献することを期待しています。」と述べています。
株式会社NTTデータグループ 技術革新統括本部Innovation技術部長 稲葉 陽子氏は、「NTTデータグループは、技術戦略に基づき、イノベーションセンタでお客様との共創による新しいビジネス創出に取り組んでいます。今回の実証により、フィジカルAIと次世代通信技術を組み合わせることで、遠隔・自律型ロボットによる設備点検の自動化の可能性が確認できました。今後、現場データとフィジカルAIを統合した価値創造を通じて、設備保全の高度化と現場の変革を実現し、産業分野における持続可能なスマートメンテナンスの実現と現場の課題解決に貢献してまいります。」とコメントしています。
- NTT DATAのテクノロジーについて: https://www.nttdata.com/jp/ja/technology/