ACCESS、VLAモデルを活用した遠隔ロボット制御実験で高品質な通信の有効性を確認

株式会社ACCESSは、VLA(Vision-Language-Action)モデルというAI技術を使って、遠くにあるロボットを動かす実験を行いました。この実験で、高品質な光ネットワークであるIOWN®オールフォトニクスネットワーク(APN)を使うと、離れた場所からでも、まるで近くで操作しているかのようにロボットを正確に動かせることを確認しました。
社会の課題とVLAモデルへの期待
日本では、少子高齢化が進み、多くの産業で現場の仕事に課題を抱えています。例えば、経験豊富な技術者が引退したり、若い人材が不足したり、遠くの拠点を維持するのが難しくなったりしています。このような課題を解決する方法として、VLAモデルが注目されています。VLAモデルは、画像を見て(Vision)、言葉を理解し(Language)、行動する(Action)という3つの能力を組み合わせたAI技術です。これにより、人間の指示を理解し、現場の状況を判断して、ロボットが自分で動くことができると期待されています。

実験の内容
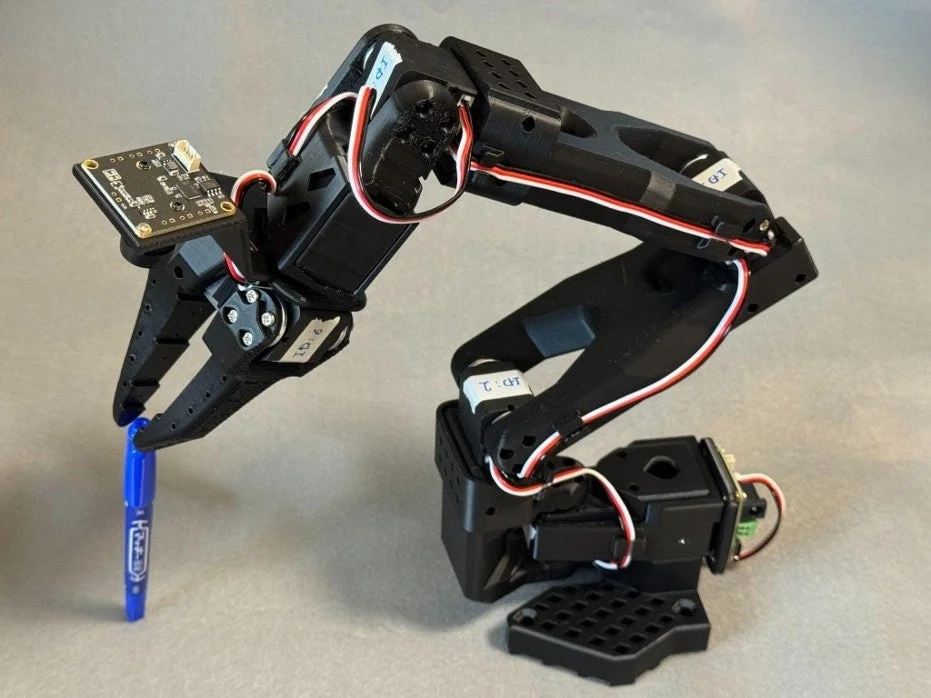
ACCESSは、独自に開発したVLAモデルを搭載したコンピューターと、離れた場所にあるロボットをネットワークでつなぎ、物を掴んで運ぶタスクを行いました。この実験では、コンピューターの近くにロボットを置いた場合(ローカル環境)と、IOWN APNという高品質な光ネットワークを使って遠くからつないだ場合(遠隔接続環境)を比べて、VLAモデルによるロボットの遠隔制御がどれくらい実現できるかを調べました。IOWN APNの構築には、NTT西日本株式会社が協力しました。
実験の結果
実験の結果、IOWN APNを使った遠隔環境でも、いくつかのタスクでは、近くで操作している場合とほぼ同じようにVLAモデルでロボットを制御できることがわかりました。具体的には、ロボットの動きが安定し、なめらかさを保ち、操作の遅れや動きが止まることが少なかったです。VLAモデルを使った遠隔制御は、映像の取得、AIによる判断、ロボットの制御が連動して行われるため、通信の遅れや不安定さが操作性や作業の効率に大きく影響します。今回の実験では、IOWN APNを使うことで、遠隔でもリアルタイムに連携し、高い通信品質が維持されたことが確認されました。
今後の展望
VLAモデルはまだ研究開発の段階にあり、すぐに社会で広く使われるわけではありません。しかし、将来的には、経験豊富な技術者が遠くから複数の現場を支援したり、危険な作業をロボットに任せたり、インフラの点検や保守の仕事を効率化したりするなど、様々な分野で活用されることが期待されています。これにより、人手不足や技術の継承といった日本の現場が抱える課題を解決できるでしょう。
VLAモデルを社会で実際に使うためには、AIの技術だけでなく、通信、IoT(モノのインターネット)、クラウド、リアルタイムでの制御、遠隔操作、データの統合など、多くの技術が必要です。ACCESSは、VLAモデルを単なるロボットの制御技術としてではなく、社会の課題を解決するための大切な技術と位置づけています。ACCESSはこれからも、AI、通信、IoT、ロボット技術を組み合わせた研究開発を進め、人とAIが協力して働く新しい現場の実現を目指していきます。
株式会社ACCESSについて
株式会社ACCESSは、1984年に設立されたソフトウェア会社です。世界中の通信、家電、自動車、放送、出版、エネルギーインフラなど、さまざまな業界にモバイルやネットワークのソフトウェア技術を核としたITソリューションを提供しています。現在、組み込み技術とクラウド技術を組み合わせたDX(デジタルトランスフォーメーション)やIoTソリューションの開発に力を入れています。

同社の詳細については、以下のリンクから確認できます。
※ACCESS、ACCESSロゴは、日本国、米国、およびその他の国における株式会社ACCESSの登録商標または商標です。
※その他、文中に記載されている会社名および商品名は、各社の登録商標または商標です。