山岳トンネルの危険な最前線をロボットが探査!ポケット・クエリーズと鴻池組が実証実験に成功

株式会社ポケット・クエリーズと株式会社鴻池組は、2025年7月に発表した「四足歩行ロボットによる施工管理自動化プロジェクト」の一環として、山岳トンネル建設現場の「切羽(きりは)」と呼ばれる掘削最前線で、ロボットによる探査の実証実験を2026年2月8日に実施しました。
この実験は、山岳トンネルを掘り進める上で最も危険な場所である切羽で、四足歩行ロボットを使って人が立ち入らずに探査できるかを試すものです。以前は「こんな技術ができたらいいな」という構想段階でしたが、今回、実際に現場でロボットが探査し、必要なデータを手に入れることに成功しました。これは、この技術が本当に役立つことを証明する大きな成果です。

実証実験の具体的な成果
今回の実証実験では、実際の山岳トンネル切羽で、主に以下の3つの点について確認し、役立つデータが取れることを確かめました。
危険な場所への無人探査
発破(ばっぱ)の直後で、地面が崩れたり岩が落ちてきたりする危険がある切羽へ、人間が入る前に四足歩行ロボットが先に進みました。でこぼこした足場でも、ロボットが自分で道を判断して進んだり、遠隔で操作したりすることで、安全に探査ができることを示しました。

リアルタイムで有害ガスをチェック
ロボットに付いているガスセンサーを使って、切羽の近くの酸素の量や、燃えやすいガス、毒ガスの有無を、離れた場所からリアルタイムで監視しました。これにより、人間がその場に行かなくても、機械が安全な環境かどうかを数字で判断し、人がトンネルに入れるかどうかを早く決められるようになりました。

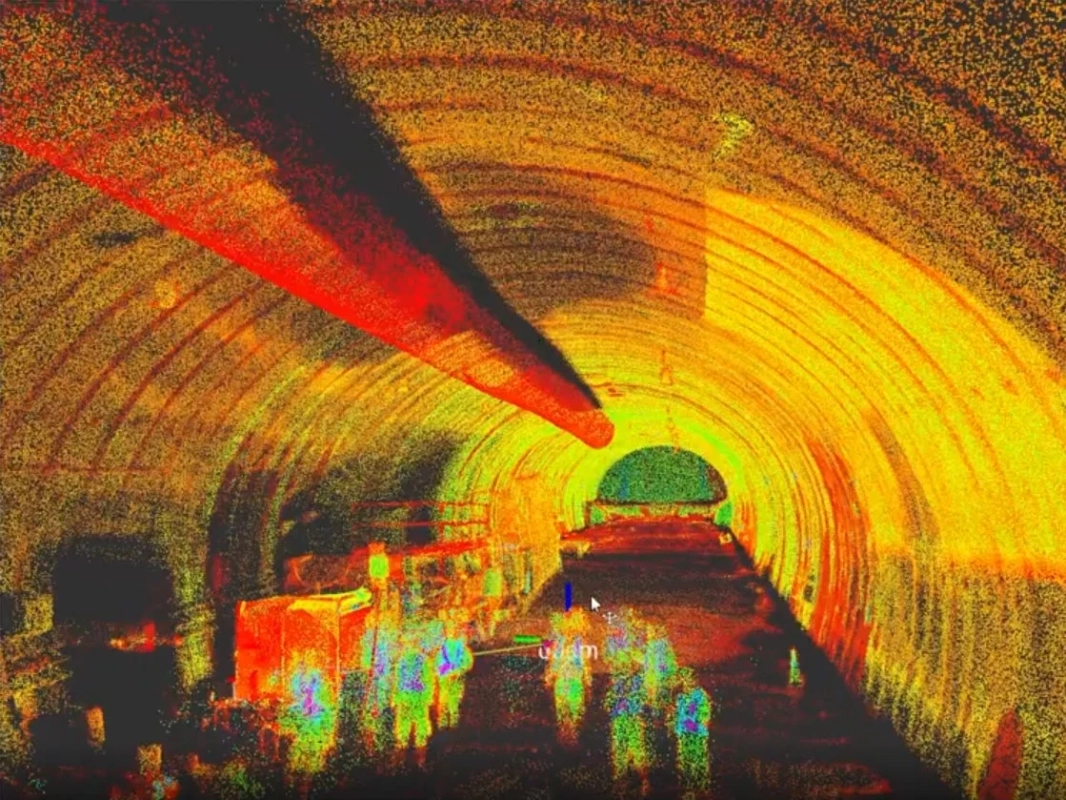
LiDARでトンネルの形を正確に記録
レーザーを使うLiDAR(ライダー)という技術で、切羽やトンネルの形を3Dデータとして取得しました。このデータは、BIM/CIMという建設のデジタル管理システムとスムーズに連携でき、工事の進み具合をデジタルで管理したり、時間の経過でトンネルの形が変わらないかをチェックしたりするのに役立つことが分かりました。
これからの挑戦:現場の困りごとを解決するために
今回の実地検証を通じて、実際に使う上でクリアすべき技術的な課題もはっきりと見えてきました。
今後は、以下の点に特に力を入れ、ロボットがもっと丈夫で使いやすくなるように改善していきます。
-
複雑な地形への対応力アップ:地山が崩れた後のもっとひどい悪路でも、ロボットが安定して歩けるようにする。
-
長く使えるようにする:続けて動ける時間を長くし、通信も安定させることで、広い範囲をロボットが自分でパトロールできるようにする。
-
BIM/CIMとの自動連携:取得した3Dデータから、工事の進み具合を自動で分析するプログラムを作る。
このプロジェクトは、一度きりの実験で終わるものではありません。ポケット・クエリーズと鴻池組は、今回の成果を「これからの建設現場の当たり前」にするために、現場の安全と仕事の効率を根本から変える技術開発を続けていくとのことです。
四足歩行ロボットが最も危険な場所で働くことで、人間はもっと安全な場所で、より大切な判断や新しいアイデアを考えることに集中できるようになります。このような建設現場を実現するために、両社は着実に進んでいくでしょう。

株式会社ポケット・クエリーズについて
ポケット・クエリーズは、現場を持つ企業が抱える「人手不足」の問題を解決するため、技術の継承や省力化、多様な作業ができる人材育成を目的とした現場向けのDXツールを多く開発しています。また、これらの分野でAI技術を活用した検証や実際の運用も行っています。
-
本社:東京都新宿区西新宿3-20-2 東京オペラシティタワー52F
-
代表者:代表取締役社長 佐々木 宣彦
-
事業内容:ロボティクス/IoT事業、VR/AR/MRの実用アプリケーション開発、3D-CG事業