デジタルツイン総合研究所、AIが自ら学び進化する技術で現場の課題解決を加速
デジタルツイン総合研究所、AIが自ら学び進化する技術で現場の課題解決を加速

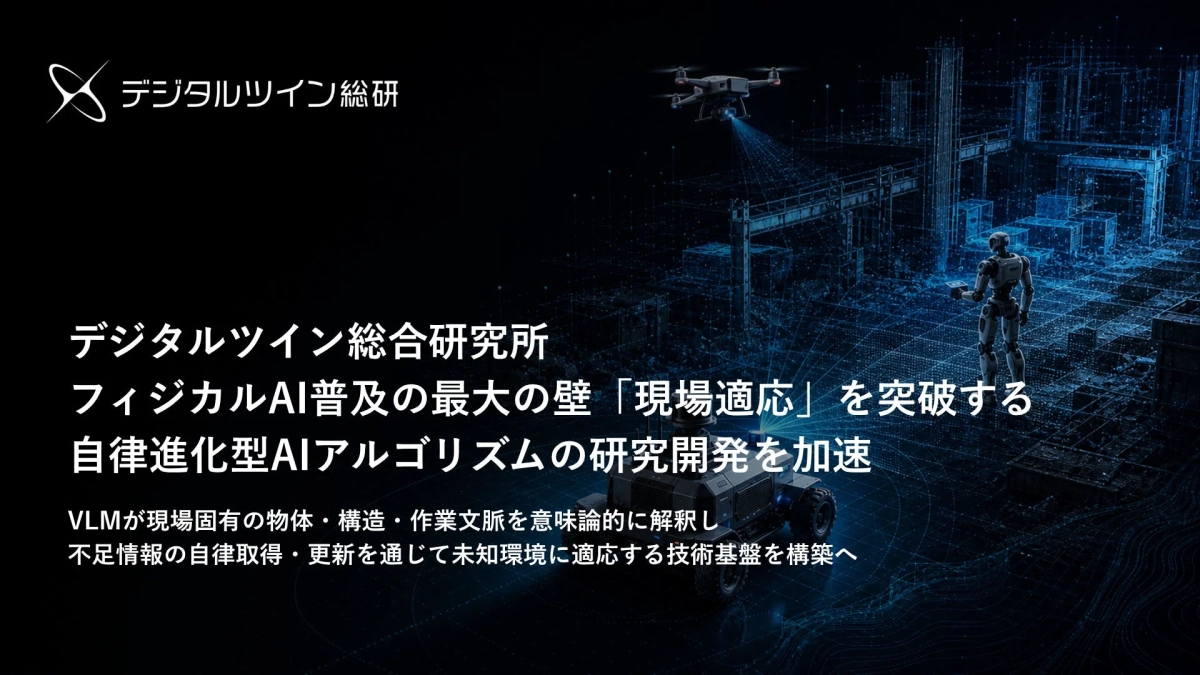
株式会社デジタルツイン総合研究所(DTRI)は、現実世界で動き、判断する「フィジカルAI」が広く使われるための大きな課題である「現場への適応」を解決する研究開発を加速しています。この技術は、AIが自分で足りない情報を見つけ、それを集めて、現実世界の状況を理解する「世界モデル」を常に新しくしていく「自己改善型フィジカルAI基盤」の確立を目指すものです。
DTRIの研究開発は、原子力関連施設のような人が簡単に入れない厳しい場所で、ロボットが自律的に動き、3Dの地図を作り、周囲を認識し、AIを搭載した小型機器(エッジAI)を使ってロボットを動かす経験を持つ技術者たちが中心となって進められています。暗い場所や複雑な建物の中でも、ロボットが環境を認識し、移動し、必要な情報を集めるための技術を活かし、フィジカルAIを実際の現場で使えるようにするための基本的な技術を研究しています。
DTRIは、工場や建設現場など、現実世界の産業現場にAIを導入するには、AIの性能だけでなく、それぞれの現場で異なる設備、構造、作業手順、環境の変化にAIが継続的に対応し続ける仕組みが不可欠だと考えています。
フィジカルAI普及の課題「最後の1マイル」
世界では、文章や画像を自動で作り出す「生成AI」の次に、ロボットなどが現実世界を理解して行動する「フィジカルAI」に注目が集まっています。しかし、AIの基本的な技術やロボットの技術が進歩しても、実際の産業現場に導入する際には、まだ大きな課題が残されています。
それが、現場ごとに異なる環境への適応です。工場、物流倉庫、建設現場、インフラ設備、林業、災害現場など、現実世界の環境は常に変化しています。設備の配置、照明、作業手順、障害物、建物の古さ、天候、地形、人の操作方法は現場ごとに違い、事前にすべての情報を集めて準備することは難しいのが現状です。
これまでは、このような現場への適応のために、専門家が大量のデータを集め、環境を整え、データに名前をつけ、AIを調整し、再度計測するといった多くの手間と費用がかかっていました。DTRIは、この「最後の1マイル」と呼ばれるコストこそが、フィジカルAIが社会で広く使われることを妨げる最大の原因だと考えています。
AIが「何を知らないか」を自ら判断し、学習に必要な情報を取りに行く技術
これまでのAIは、基本的に「与えられたデータをもとに学習する」技術でした。人間があらかじめデータを集め、ラベルを付け、学習の準備を整え、その上でAIが賢くなっていく、という流れです。つまり、AIの性能は、事前に人間が用意したデータの量と質に大きく左右されていました。
しかし、フィジカルAIが向き合う現実世界では、必要な情報が最初からすべて揃っていることはほとんどありません。工場、物流倉庫、建設現場、インフラ設備、災害現場などでは、環境は常に変化し、照明、設備配置、障害物、作業手順、地形、劣化の状態も現場ごとに異なります。あらかじめ「必要なデータをすべて集めておく」ことは、現実的にも費用面でも困難です。
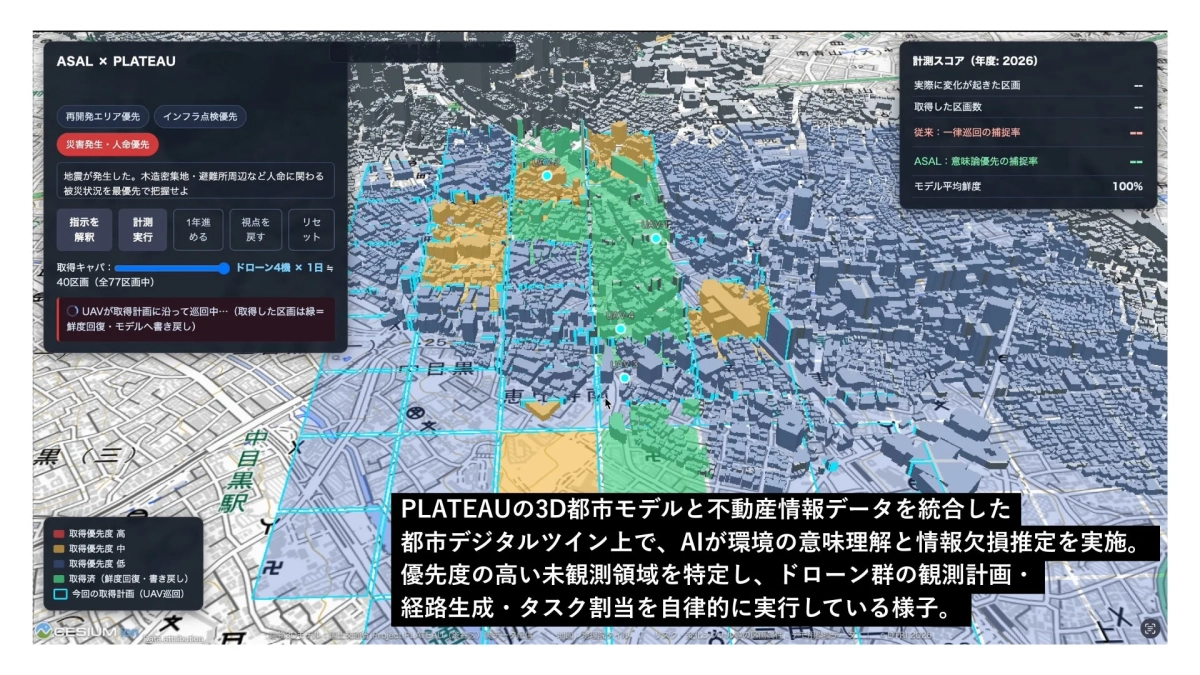
DTRIが研究開発を進めるのは、この考え方を変える技術です。AIが与えられた情報を処理するだけでなく、自ら「何を理解できていないのか」「どの情報が足りないのか」を認識し、その不足を補うために、次にどんなデータを集めるべきか、どこを見るべきか、どんな視点から確認すべきかを判断します。そして、ロボット、ドローン、センサー、あるいは人に対してデータ取得の指示を出し、得られた情報をもとに、現実世界のデジタルコピー(デジタルツイン)や「世界モデル」を継続的に更新していきます。
つまり、DTRIが目指すのは、データ集めそのものをAIの学習サイクルの中に組み込むことです。
この技術では、以下のようなサイクルを実現することを目指しています。
-
VLM(視覚言語モデル)が現場の設備、構造、作業の流れを意味的に理解する
-
AI自身が、環境の理解不足や不確かな部分を見つけ出す
-
不足している情報を補うために必要な観測地点、視点、対象をAIが自律的に決める
-
ロボット、ドローン、センサー、人に対してデータ取得の指示を作り出す
-
取得した情報をもとに、デジタルツインや「世界モデル」を継続的に更新する
これまでの「人間が集めたデータをAIが学習する」という方法ではなく、AI自身が「学ぶために必要なデータは何か」を判断し、積極的に取得していくのです。この仕組みにより、現場ごとのデータ取得、環境の準備、運用・更新にかかる費用を大幅に減らし、未知の環境や変化し続ける現場にも対応できるフィジカルAIの実現を目指します。
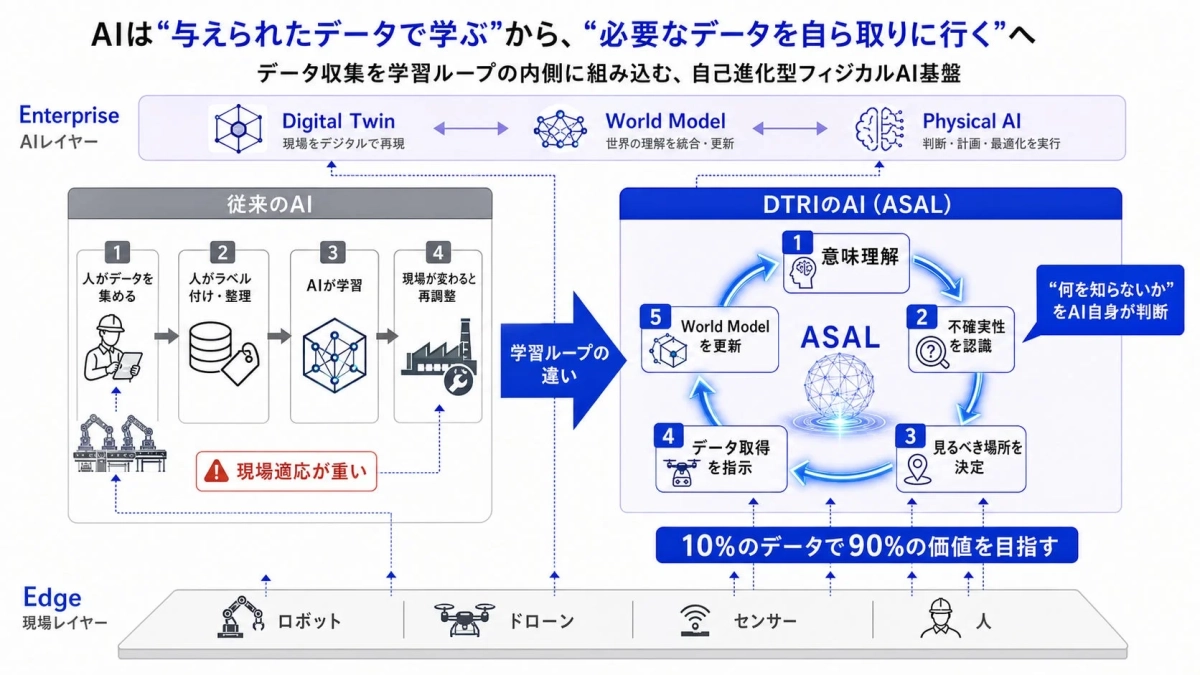
DTRIはこの技術体系を、自らデータを積極的に取得する一連の流れ「ASAL(Active Site Acquisition Loop)」として研究開発しています。
初期開発の進捗
DTRIでは現在、ASALの中心となる「環境の理解不足をAI自身が発見し、必要な情報取得行動を作り出す自己改善ループ」の初期段階の実装を進めています。
最初の検証では、2次元の環境において、ロボットがまだ見ていない場所を特定し、その重要度を判断した上で、次にどこを観測すべきかを選ぶ一連のサイクルを試作しています。これは単なる自動で動く技術ではありません。AIが自分自身の認識不足を理解し、その不足を解消するための観測行動を作り出す、自己改善型フィジカルAIの根本となる能力の実現を目指すものです。
今後は、3次元の環境への応用、VLMと3D SLAM(周囲の地図を作りながら自分の位置を推定する技術)の統合、実際のロボットやドローンとの連携、製造・物流・建設・インフラ・災害対応の現場での検証を進めていく予定です。
応用領域
この技術は、環境の変化が大きく、事前にすべての情報を集めることが難しい現場で特に役立ちます。DTRIは、製造・物流、インフラの維持管理、防災・災害対応、防衛・重要な施設の保全など、不確かな要素が多い現実環境での活用を見据えています。
-
製造・物流領域
レイアウト変更や設備の更新があった際に、ロボットが自律的に再測定を行い、環境を理解し、最新の運用環境に適応することを目指します。 -
インフラ維持管理領域
橋やトンネル、工場設備、送電設備などの状態変化を継続的に把握し、デジタルツインの更新や点検作業の省力化につなげます。 -
防災・災害対応領域
被災地や危険な場所など、人が簡単に入れない環境で、ロボットやドローンが「次に見るべき場所」を自ら判断し、状況の把握を助けることを目指します。 -
防衛・重要施設保全領域
防衛施設、重要なインフラ、港、空港、発電所、通信設備など、環境変化や不確かな要素が大きく、常に状況を把握する必要がある現場で、AIが自律的に足りない情報を取得し、最新の環境理解を保つための基本的な技術として活用できます。人が常に確認することが難しい場所でも、ロボット、ドローン、センサーの集まりが自律的に「どこを見るべきか」を判断し、現場の状況把握・更新・異常の発見を支援します。
DTRIが目指す世界
DTRIが目指すのは、フィジカルAIを導入する前に必ず必要となる「現場適応のための基盤」を確立することです。現場の情報を取得し、整理し、デジタルツインを作り、AIが自ら足りない情報を判断して、再び取得し、更新し続ける。この一連の仕組みが整うことで、ロボットやAIは一時的な実証実験(PoC)だけでなく、現場で長く使い続けられる技術となります。
DTRIは、製造業、物流、建設、インフラ、林業、災害対応などの現場において、AIが自ら世界を理解し続ける基盤を作ることで、日本発のフィジカルAIの基本的な技術を生み出すことに挑戦します。
代表コメント
代表取締役の黒田 佳吏夫氏は、「世界では今、フィジカルAIを次の大きな産業にしようという競争が始まっています。日本には、製造業、建設、物流、インフラ、林業など、フィジカルAIが最も必要とされる現場が多くあります。一方で、AIやロボットを現場に導入するには、現場ごとの環境に適応するための膨大なデータ取得と調整が必要です。この“現場適応”にかかる費用を下げなければ、フィジカルAIは一部の大企業だけの技術になってしまいます。私たちは、AI自身が『何を知らないのか』を理解し、自ら必要な情報を取りに行き、学び続ける仕組みを作ることで、この壁を突破したいと考えています。フィジカルAIの未来は、より賢いモデルを作る競争だけでなく、現実世界をどれだけ理解し続けられるかの競争になるはずです。当社は、日本発の基本的な技術によってその未来を支え、フィジカルAIを日本の新しい主要産業へと発展させることに挑戦していきます。」と述べています。
共同研究・実証パートナーの募集
DTRIは、この技術を通じて、フィジカルAIやデジタルツインを導入する際に大きな負担となっていた現場データの取得、環境の準備、再測定、運用・更新の費用を大幅に下げることを目指しています。
これまでは、専門家が現場ごとにデータを集め、環境を整え、AIやロボットを調整する必要がありました。DTRIが研究開発するASALは、AI自身が「次に何を測るべきか」を判断し、ロボット、ドローン、センサー、人に対して取得指示を出すことで、この現場適応のプロセスを省力化しようとするものです。
DTRIでは現在、製造・物流・建設・インフラ・防災・防衛・自治体DXなどの分野で、この技術の共同研究や実証に関心のある企業、自治体、行政機関、研究機関、大学、事業会社からの相談を受け付けています。
特に、以下のような課題を持つ方との連携を歓迎しています。
-
フィジカルAIやロボットを導入したいが、現場データの取得や環境の準備費用が高い
-
デジタルツインを構築したが、現場の変化に合わせた更新が難しい
-
ドローン、ロボット、センサーを使った点検・測量・現場把握をより高度にしたい
-
防災、インフラ、重要な施設の保全など、人が入りにくい現場の状況把握を効率化したい
-
国や自治体の実証事業、研究開発事業、補助金事業としてフィジカルAIを検討したい
共同研究、実証実験、技術検証、行政・自治体との実証事業、事業会社とのPoCなど、初期段階から柔軟に相談が可能です。関心のある方は、ぜひお問い合わせください。
本件に関するお問い合わせ先
株式会社デジタルツイン総合研究所
Email:karifu.kuroda@dtsoken.com
採用について
DTRIでは現在、フィジカルAI、デジタルツイン、「世界モデル」の分野で研究開発を共に進めるエンジニア・研究者を募集しています。コンピュータビジョン、ロボット工学、SLAM(自己位置推定と環境地図作成)、3Dコンピュータグラフィックス、シミュレーション、機械学習、強化学習、「世界モデル」、VLM(視覚言語モデル)、生成AIなどの分野に関心のある方は、気軽にご連絡ください。
会社概要
会社名:株式会社デジタルツイン総合研究所(DTRI)
代表者:代表取締役 黒田 佳吏夫
設立:2025年7月1日
本社:〒105-6415 東京都港区虎ノ門1-17-1 虎ノ門ヒルズ ビジネスタワー15階
研究開発拠点:島根県雲南市
事業内容:フィジカルAI/デジタルツインの研究開発および現場実装支援
本件に関するお問い合わせ先
株式会社デジタルツイン総合研究所
Email:karifu.kuroda@dtsoken.com