遠隔ドローン操縦の映像品質を安定化させる新技術を実証、約60km離れた場所からの精密点検が可能に
NTT、NTT-ME、NTTイードローンの3社は、無線区間で発生する通信の遅延揺らぎを減らし、遠隔でドローンを操縦する際の映像品質を安定させる技術を開発し、その有効性を実証しました。
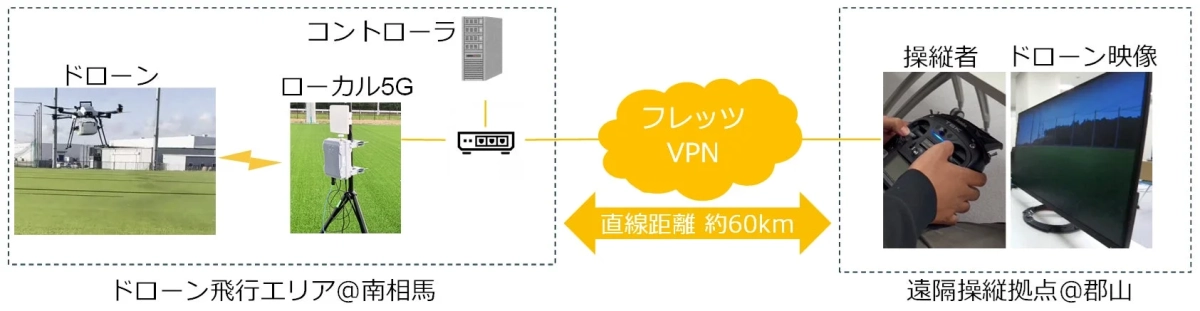
この実証では、約60km離れた場所からローカル5GとフレッツVPNを使ってドローンを遠隔操縦し、安定した映像伝送が可能であることを確認しました。これにより、危険な場所での点検作業などを、現地に人を送ることなく、より正確に行えるようになります。
背景にある課題
日本では、働く人の数が減っているため、橋や工場などのインフラや設備の点検作業で、人手を確保することが難しくなっています。このような状況で、ドローンを使った遠隔からの点検作業に大きな期待が寄せられています。
特に、建設現場や工場のように、点検する場所が日々変わったり、狭い空間だったりする場合には、ドローンを正確かつ安全に、リアルタイムで遠隔操縦することが求められます。そのためには、通信が途切れないだけでなく、映像が乱れない安定した伝送が必要不可欠です。
しかし、無線区間ではパケットの遅延にバラつき(揺らぎ)が発生しやすく、それが映像の乱れにつながり、操縦の正確さを低下させるという問題がありました。無線通信では、上りと下りの通信が同じ周波数帯を使っていることや、電波の状態が悪くなったときにデータを送り直す制御(再送制御)が起こることが、この揺らぎの原因となっていました。このような課題を解決するため、遠隔からでも安心してドローンを操縦できるような、映像品質を安定化させる技術の開発と実証に取り組んできました。
研究の成果
今回の実証では、ドローン操縦者がネットワークを通じて送られてくるカメラ映像を見ながら、ドローンを遠隔で操縦できるシステムを構築しました。具体的には、福島県南相馬市にあるロボットテストフィールドにドローンを置き、福島県郡山市から操縦を行いました。この2つの拠点は直線距離で約60km離れており、ローカル5GとフレッツVPNで接続されています。この環境で、ドローンを遠隔から操縦できることを確認しました。

さらに、このシステムに、無線区間で発生する遅延揺らぎを補正する機能を組み込みました。多くの映像データを送る際に、技術を適用しない場合は伝送時間全体の12%で映像の乱れが検出されましたが、この新技術を使うことで、映像が乱れる時間を5%まで減らすことができました。また、映像の乱れが大きいと、操縦者が操作を中断するため、目的地に到達するまでに時間がかかります。そこで、移動にかかる時間も評価しました。
現地で目視しながら操作した場合の平均移動時間は35秒でしたが、郡山からの遠隔操作でこの技術を適用したところ、操縦を中断することなく平均32秒で移動を完了でき、ほぼ同じ時間で目的地に到達できることが確認されました。これは、操縦に影響が出ないレベルの映像品質が実現できたことを意味します。
技術のポイント
無線区間では、データの送り直しなどによって遅延の揺らぎが発生し、それが映像のフレーム(コマ)の間隔を乱し、最終的に映像の乱れにつながります。今回開発された技術は、この問題を解決します。
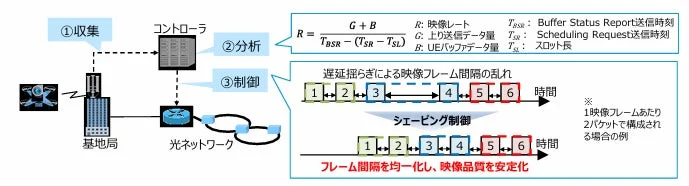
この技術では、無線基地局から集めた通信情報をもとに、コントローラが映像のデータ量(映像レート)を分析します。そして、その映像レートに合わせて光ネットワーク装置で映像フレームの間隔を調整する「シェーピング制御」を行うことで、無線区間で発生する遅延の揺らぎを減らすことができます。
無線基地局だけでは、無線区間の遅延揺らぎに対応するのは難しいですが、無線区間と光区間を連携させて制御することで、遅延揺らぎを減らし、映像品質を安定させることが可能になります。
この技術は、次の3つのステップで構成されています。
- 収集: 無線基地局から常に情報を集め、映像レートの変化に素早く対応します。
- 分析: 集めた通信情報から、正確な映像レートを計算します。
- 制御: 計算した映像レートに合わせてシェーピング制御を行い、映像フレームの間隔を調整します。
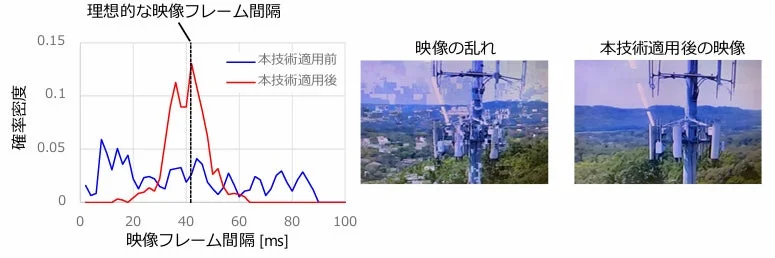
映像フレームの間隔の分布が理想的な値に近いほど、映像品質は安定していると言えます。この技術を適用する前は、無線区間の遅延揺らぎにより、映像フレーム間隔のバラつきが大きく、映像が乱れていました。しかし、この技術を適用することで、遅延揺らぎが減り、映像フレーム間隔を理想的な値に近づけられるため、映像の乱れも解消されます。
各社の役割
今回の実証実験における各社の役割は以下の通りです。
-
NTT: 映像品質安定化技術の実装と、遠隔操縦におけるこの技術の有効性を検証しました。
-
NTT-ME: 実証におけるローカル5Gの設計、構築、運用を担当しました。
-
NTTイードローン: 実証におけるドローンおよび操縦環境の提供と、目視外での操縦性の確認を行いました。
今後の展開
この技術により、遠隔操縦者へ安定した映像品質を届けられるようになります。今後は、ドローンだけでなく、無人航空機やロボットの操縦など、幅広い分野への適用を目指し、この技術の実用化を進めていく予定です。
また、この技術は点検以外の遠隔業務でも活用できます。様々な分野での遠隔操作業務を推進し、人手不足の解消に貢献していきます。
用語解説
-
ローカル5Gについて: https://business.ntt-east.co.jp/solution/local5g/
-
フレッツVPNについて: https://business.ntt-east.co.jp/service/vpnprio/
-
つくばフォーラム2026について(展示予定): https://www.rd.ntt/as/tforum/