安藤ハザマとコベルコ建機がトンネル工事の自動化技術を実証 〜あたり取り作業の無人化へ第一歩〜
安藤ハザマとコベルコ建機は、トンネル工事現場で重要な「あたり取り作業」を自動で行う技術を開発し、実際のトンネル現場でその性能を確かめる実験を行いました。この取り組みは、建設現場の安全性を高め、作業を効率化することを目標としています。
開発の背景
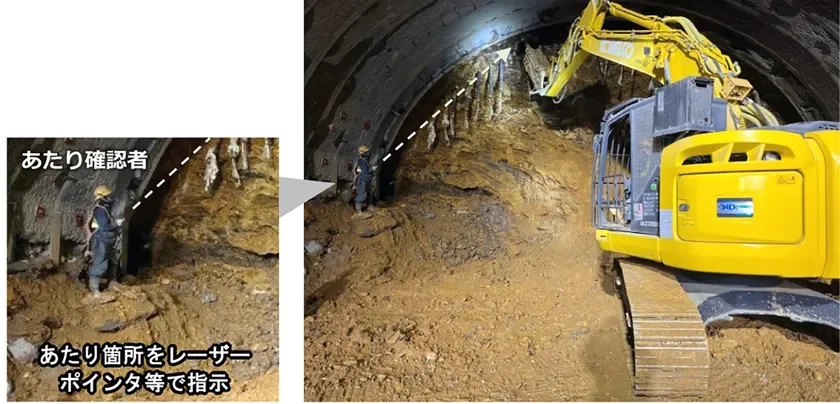
建設業界では、少ない人数で作業を進めたり、作業の安全性を高めたりする技術が求められています。特に山岳トンネル工事では、発破後にできた岩盤の凸凹のうち、設計よりも飛び出た部分(あたり)をブレーカーショベルで取り除く作業があります。
これまでの作業では、重機の操縦者と作業員が2人1組で行い、掘削直後の危険な場所で目視確認が必要だったため、岩が落ちるなどの事故のリスクがありました。この問題を解決するため、2024年に安藤ハザマは、切羽のあたり部分をリアルタイムでわかる「あたり検知システム」を開発し、作業員が安全な場所から確認できるようになりました。さらにこの作業をより進化させるため、コベルコ建機が開発中の「自動運転システム」と連携させる技術の開発が進められました。

本技術の概要
この技術は、「自動運転システム」を搭載したブレーカーショベルに、「あたり検知システム」を組み合わせて、二つのシステムを連携させることで、あたり取り作業を自動で行います。
あたり検知システムが集めた、ブレーカーショベルの正確な位置や姿勢、あたり部分の情報は、自動運転システムに送られます。これにより、あたり部分を取り除くための最適なアームやブームの動きが自動で計算されます。その後、作業開始の指示を出すと、決められた手順で岩を砕く作業が自動で実行されます。この自動運転では、重機が走行することはなく、同じ場所で旋回したり、アームやブーム、先端の工具を動かしたりすることで、あたり取り作業を自動で行うことができます。

トンネル現場での実証実験
開発された技術が実際に使えるか、そして現場で安定して動くかを確かめるため、工事中の山岳トンネル現場で実証実験が行われました。この実験では、これまで人の目では難しかった岩盤のあたり部分を自動で探し出し、自動運転システムを搭載したブレーカーショベルがそれを取り除く一連の動作が確認されました。
「あたり検知システム」と「自動運転システム」を連携させ、切羽の前に置かれた無人のブレーカーショベルに対し、タブレットを使って後方から自動運転の指示を出し、一つ一つの動きを細かく確認しました。その結果、岩盤を打撃する動作に関する新たな課題が見つかり、今後の改善点として具体的な項目が洗い出されました。また、トンネル内の限られた空間で、自動で動くブレーカーショベルがトンネルの壁に触れることなく、あたり部分の正確な位置に工具の先端(チゼル先端)を誘導できることも確認されました。


今後の展開について
今回の実証実験で、あたり取り作業を無人化するための重要な成果が得られました。安藤ハザマとコベルコ建機は、これらの成果をもとに、さらに技術の検証を重ねていく予定です。今後は、遠隔操作の技術も組み合わせた自動施工により、あたり取り作業の安全性をさらに高めることを目指し、両社は引き続き協力して開発を進めていくとのことです。

関連情報
-
自動運転ショベルの本格展開を視野に、施工中の工事現場で実用性を検証 https://www.ad-hzm.co.jp/info/2024/20240229.php
-
トンネル切羽の“あたり”をリアルタイムに把握できる「あたり検知システム」を開発 https://www.ad-hzm.co.jp/info/2024/20240315.php