橋梁の耐震補強をロボットで効率化!「人機スチュワートプラットフォーム ver.2.0」が国際ロボット展に登場

株式会社人機一体と株式会社竹中土木は、橋梁の耐震補強作業を効率化するロボット「人機スチュワートプラットフォーム ver.2.0(以下、人機 GSP ver.2.0)」を共同開発しており、2025国際ロボット展に出展します。このロボットは、2023年の国際ロボット展で示されたソリューションから2年間の開発成果を反映したもので、今回は揚重機械(ラフテレーンクレーン)に取り付けられた状態での初公開となります。

開発の背景
人機一体と竹中土木は2022年12月に資本提携を結び、竹中土木が「ロボットが拓く、新たな土木」をコンセプトに、土木現場でのロボット活用を目指しました。両社は「橋梁耐震補強用鋼製ブラケットの取付作業」の機械化を目標に掲げ、共同開発を進めてきました。
従来工法の課題
橋梁の耐震補強工事では、桁下に鋼製ブラケットなどの重い部品を取り付ける際に、クレーンだけでは高さに限界がありました。そのため、チェーンブロックを使って部品を吊り上げ、ボルトの位置に合わせて細かく手作業で調整する必要がありました。この作業は高所で行われるため、安全性の確保や作業効率の向上が長年の課題となっていました。


2023国際ロボット展でのソリューション提示
2023年11月の国際ロボット展では、人機一体が独自に開発した試作機「人機スチュワートプラットフォーム ver.1.3」が展示されました。この試作機は、耐震補強ブラケットの取付作業を模したデモンストレーションを行い、木製の模型ではあるものの、人が直感的に操作することで短時間での取付作業が可能であることを示しました。

実証試作機の概要(人機 GSP ver.2.0)
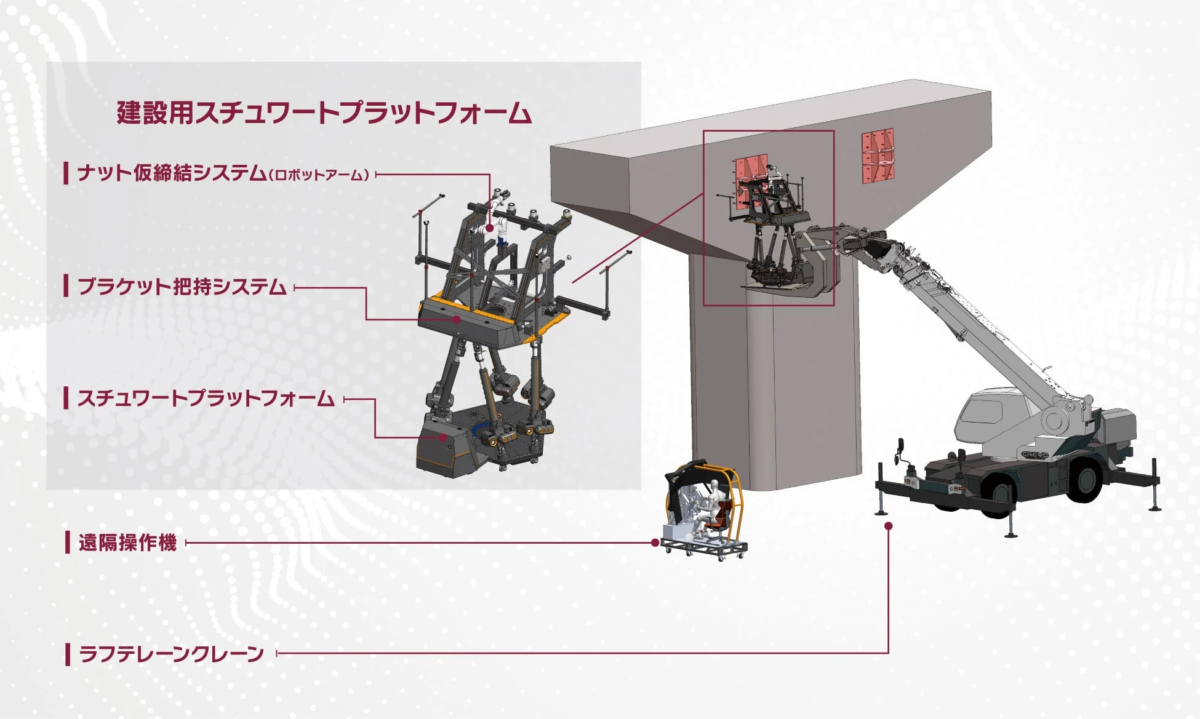
今回開発された「人機 GSP ver.2.0」は、「ナット仮締結システム(ロボットアーム)」「ブラケット把持システム」「スチュワートプラットフォーム」の3つの要素で構成されています。クレーンなどの揚重機械の先端に取り付け、遠隔操作でブラケットの位置や向きを自由に調整できます。
この新しい工法により、従来約120分かかっていたブラケット一つあたりの作業時間を、約30分まで短縮できる見込みです。

このスチュワートプラットフォーム部分は、今年10月に開催された「ハイウェイテクノフェア 2025」の竹中土木ブースで初めて公開されました。現在は、ラフテレーンクレーンに搭載し、高さ約7mの場所への鋼製ブラケット取付作業の予備試験を進めています。


各システムの詳細
-
ナット仮締結システム(ロボットアーム)
力制御に対応した7自由度ロボットアームを搭載しており、遠隔操作でブラケット取付後のナットを仮締結します。 -
ブラケット把持システム
電磁石によりブラケットを吸着・把持し、取付後に遠隔操作で解除します。多様な形状のブラケットに対応できるよう、幅と奥行きを調整できる機構を採用しています。 -
スチュワートプラットフォーム(GSP)
6本のシリンダが連携し、天板の位置や向きを三次元空間で自由に制御できるロボットです。複数のシリンダで天板を支えるシンプルな構造で、高い力と精度を同時に実現します。クレーンと組み合わせることで、高所作業での重量物ハンドリングに「下から持ち上げる」新しいソリューションを提供します。

iREX2025での展示内容
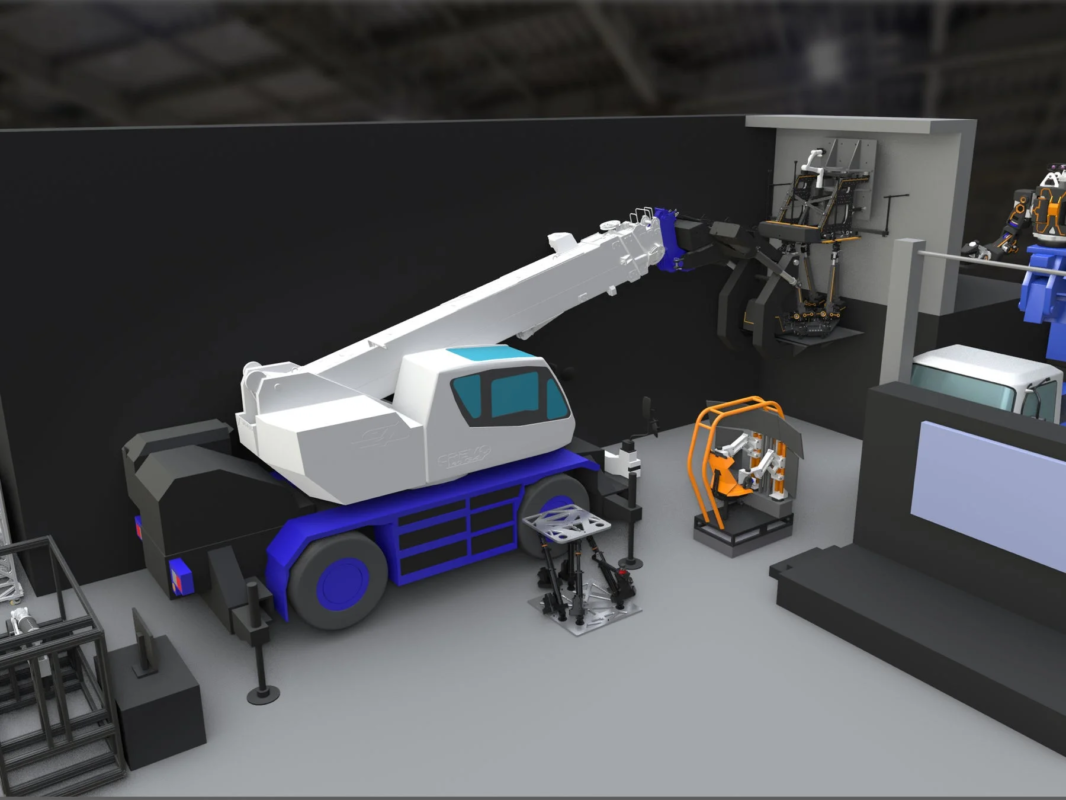
人機一体のブースでは、人機 GSP ver.2.0をタダノ製ラフテレーンクレーンのブームに搭載し、高所での鋼製ブラケット取付作業の実演と解説が行われます。現場での実用を意識したロボットシステム全体が、ラフテレーンクレーンに取り付けられた状態で初めて公開されます。
今後の展望
2026年中には、鋼製ブラケット取付作業の実現場での実証試験を目指し、開発が進められています。その後は、現場での社会実装に向けて、製品化する企業との連携を模索していく予定です。
- 関連プレスリリース(2022年12月28日):株式会社人機一体は、株式会社竹中土木と資本提携を行ないました
2025国際ロボット展(iREX2025)概要
| 会期 | 2025年12月03日(水)〜 06日(土) |
|---|---|
| 会場 | 東京ビッグサイト |
| 主催 | 一般社団法人 日本ロボット工業会、日刊工業新聞社 |
⇒ 詳細は主催者サイトをご覧ください。
会社概要
株式会社人機一体
代表者:金岡博士(Dr. KANAOKA)
所在地:滋賀県草津市青地町648番地1
拠点:福島県南相馬市原町区萱浜字巣掛場45番地245 南相馬市産業創造センター
設立:2007年10月01日
創業:2015年10月01日(現商号への変更日)
資本金:1億円
事業内容:先端ロボット工学技術に基づく新規事業開発支援のための知的財産活用サービス
URL:https://www.jinki.jp/