日立、「Physical AI」で制御ソフトウェア開発を効率化し、自動車・物流分野で成果
日立が「Physical AI」技術で社会インフラの課題を解決
日立は、現実世界でAIが「見る」「動く」といった作業を可能にする「Physical AI」の実現を目指し、新しい技術を開発しました。この技術は、自動車や物流の現場で使われる制御ソフトウェアの開発を効率化し、その再利用性を高めるものです。
複雑化する社会インフラの現場に対応
現代の社会インフラや産業現場では、デジタル化や自動化が進むことで、システムがますます複雑になっています。さまざまな機械や環境、作業内容に合わせて、柔軟に対応できる技術が求められています。また、AIや自律システムを導入する際、現場の具体的な知識や機械ごとの情報をソフトウェアに正確に反映させ、信頼性の高い自動化を実現することが大きな課題でした。
開発された二つの主要技術
日立は、このような現場の多様な課題に対応するため、制御工学とAI・ソフトウェア工学を組み合わせた技術を開発しました。
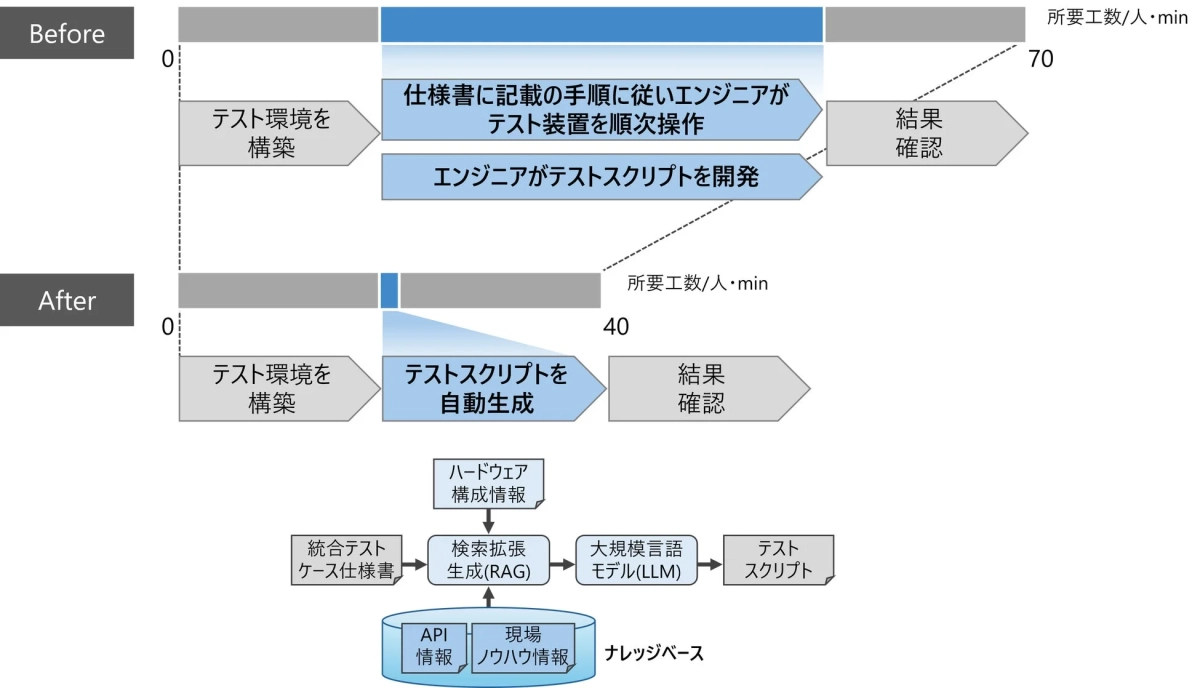
1. 自動車分野におけるAIを活用したテスト自動生成技術
日立とAstemo株式会社は、自動車のシステム向けに、AIを使ったテスト生成技術を開発しました。この技術は、実際のコントローラ(制御装置)が持つ、他のソフトウェアと情報をやり取りするための約束事(API情報)や、現場のノウハウをAI(大規模言語モデルと検索拡張生成を組み合わせたもの)に取り込みます。これにより、人が書いたテストの指示(自然言語で記述されたテストケース仕様)から、実際の機械で使うためのテストプログラム(統合テストスクリプト)を自動で作れるようになりました。その結果、従来多くの時間と手間がかかっていたテストスクリプトの作成が効率化され、特定のプロジェクトではテストにかかる時間を43%削減できました。この技術は、現場ごとのハードウェア構成にも柔軟に対応できます。

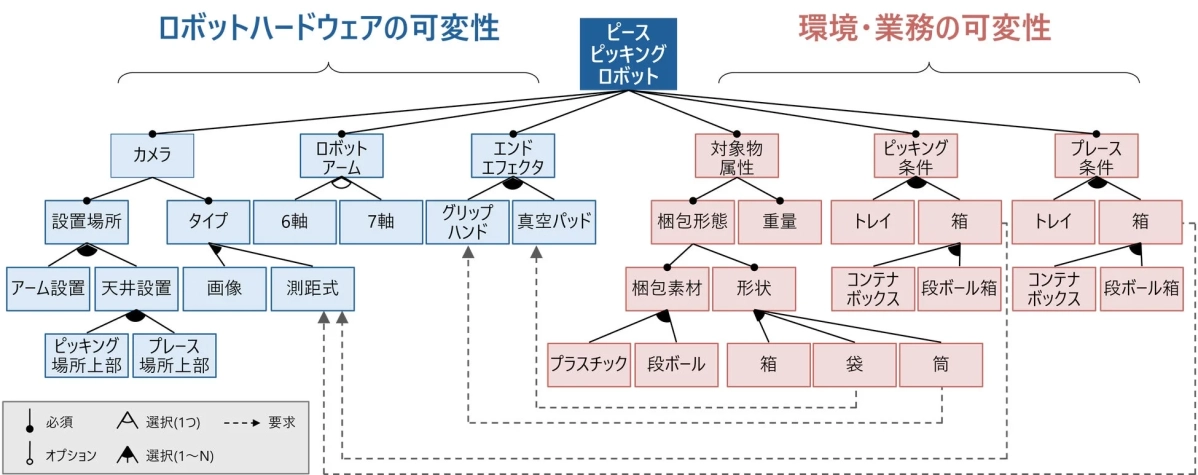
2. 物流分野における自律ロボット制御ソフトウェアの再利用性向上技術
工場や物流センターでは、製品や環境、作業内容が常に変化します。日立は、これらの多様な変化(変動要素)を事前に分析し、機能のモデルとして整理することで、ソフトウェア上で柔軟に管理できる技術を開発しました。この技術により、ロボットの制御ソフトウェアを小さな部品(モジュール)に分け、ロボット向けの共通ソフトウェア基盤であるROS(Robot Operating System)上で動くプログラムとして実装します。これにより、新しい商品やピッキング(物を掴む)/プレース(物を置く)の条件が変わっても、ソフトウェアを素早く対応させ、再利用性を高めることができます。現場のエンジニアやロボットを操作する人への聞き取りや実験を通して、システム設定作業の効率が上がったことが確認されています。
国際会議での評価
これらの二つの研究成果は、ソフトウェア工学分野の国際会議であるASE 2025(40th IEEE/ACM International Conference on Automated Software Engineering)に同時採択されました。この会議は、ソフトウェアの開発や設計を自動化する技術について、世界中の研究者や技術者が発表・議論する権威ある場です。
ASE 2025については、以下のリンクから詳細を確認できます。
ASE 2025
今後の展望
今回開発された技術は、制御ソフトウェアの開発を効率化し、現場で働く人々の負担を減らすことで、持続可能な社会インフラの実現に貢献します。現場での対応力を高めたり、作業を省力化したりすることは、労働人口の減少や多様化する社会のニーズに応えることにもつながります。日立は今後も、「Physical AI」の実現に向けた技術を、自動車や物流分野だけでなく、さまざまな社会インフラへと広げ、社会の課題解決と新しい価値の創造に貢献していくとのことです。
日立製作所のウェブサイトはこちらです。
株式会社日立製作所